

![[CONFIDENTIEL] Apple rachète Texture, le «Netflix des magazines»](https://yalayolo.co/wp-content/uploads/2020/11/texture-apple-360x180.png)
![[CONFIDENTIEL] Bitcoin, WeWork, Lyft, Donald Trump vs. Broadcom, Dropbox…](https://yalayolo.co/wp-content/uploads/2020/11/john-oliver-hbo-bitcoin-crypto-360x180.png)
![[CONFIDENTIEL] 45 millions de dollars pour le fonds de Snoop Dogg dédié au cannabis](https://yalayolo.co/wp-content/uploads/2020/11/youtube-550x342-360x180.jpg)
![[CONFIDENTIEL] Wikipédia vs. YouTube, Hellocare, Theranos, Early Birds…](https://yalayolo.co/wp-content/uploads/2020/11/hellocare-360x180.jpg)
![[INSIDERS] Dominique Delport, rattrapé par le Vice](https://yalayolo.co/wp-content/uploads/2020/11/vice-media-360x180.jpg)
![[INSIDERS] Twitter veut interdire les publicités sur les cryptomonnaies](https://yalayolo.co/wp-content/uploads/2020/10/bitcoin-smartphone-360x180.jpg)












![[Tribune] « Le cookie est mort, vive la Customer Data Platform ! »](https://yalayolo.co/wp-content/uploads/2022/10/Tribune-cookie-est-mort-vive-Customer-Data-F-360x180.jpg)

































[ad_1]
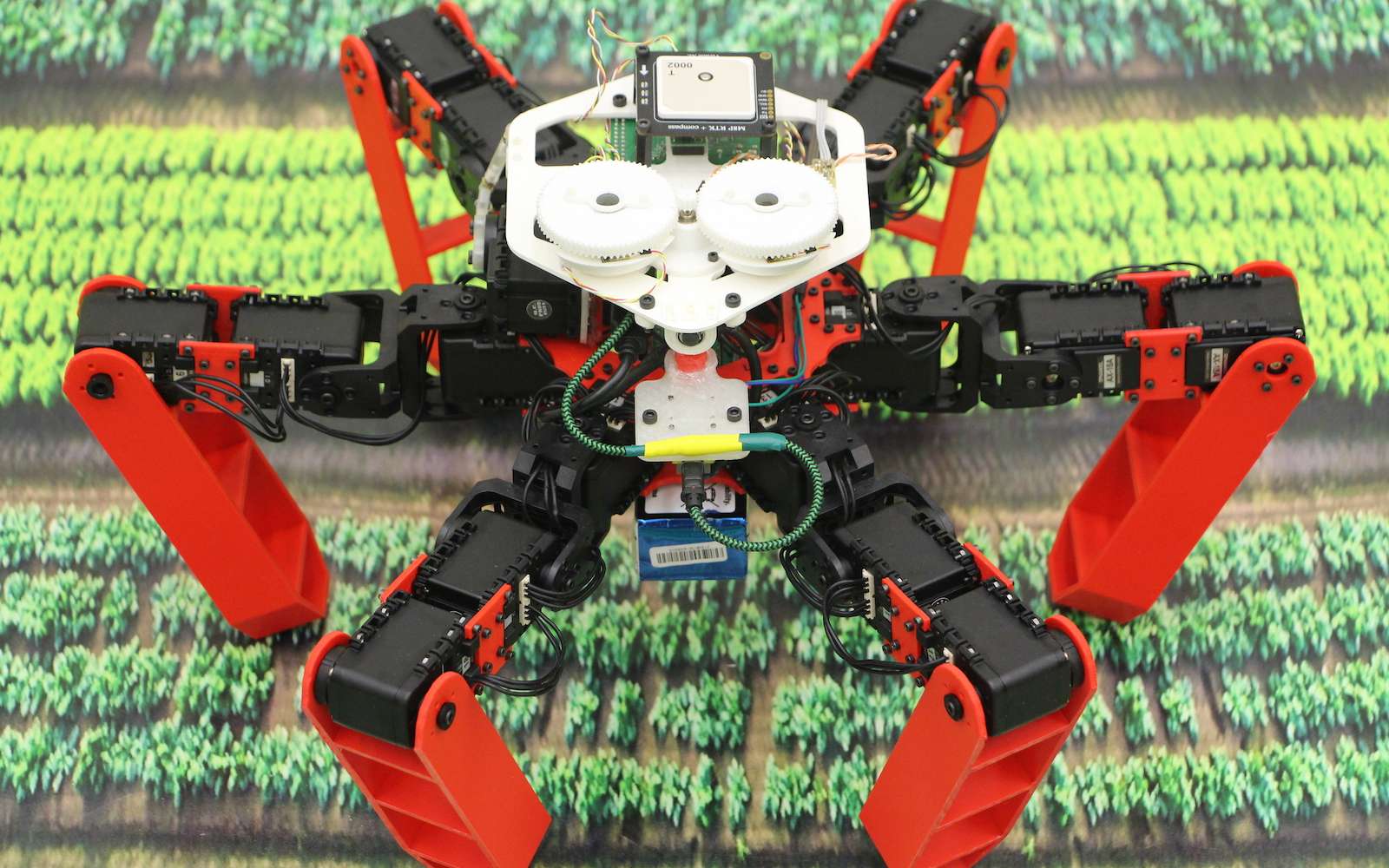
Inspirée de la fourmi du désert, AntBot peut se promener et rentrer seul à la maison automatiquement, sans GPS, ni cartographie. Pour les chercheurs du CNRS, sa « boussole céleste » pourrait équiper à l’avenir des véhicules autonomes, des drones et d’autres robots explorateurs.
Dans un article publié dans la revue Science Robotics, des chercheurs du CNRS et d’Aix-Marseille Université ont présenté un robot d’un nouveau genre. Baptisé AntBot, il ressemble à une araignée à six pattes mais il est inspiré de la fourmi du désert, Cataglyphis, et utilise la lumière plutôt qu’une puce GPS pour naviguer et se déplacer.
Contrairement à ses cousines qui habitent dans des climats plus cléments, la fourmi du désert ne peut pas utiliser de phéromones comme aide à la navigation à cause de la chaleur. Elle dépend donc entièrement de ses autres sens pour pouvoir retrouver son nid après avoir parcouru plusieurs centaines de mètres. Les fourmis sont capables de voir la lumière polarisée et les rayons ultraviolets, invisibles à l’œil humain. Grâce à la lumière polarisée du ciel, elle est capable de mesurer précisément son cap pour savoir à tout moment dans quelle direction se trouve le nid. Elle mesure la distance en comptant ses pas, et sait exactement où elle se trouve par rapport à son point de départ. D’autres insectes utilisent également ce système, comme les drosophiles qui sont ainsi capables de voler en ligne droite.
Un système précis sans GPS
Les chercheurs de l’Institut des Sciences du mouvement-Étienne Jules Marey (ISM) ont donc cherché à reproduire cette technique avec une fourmi robotique géante de 2,3 kilogrammes. L’AntBot se déplace sur six pattes afin d’explorer son environnement avec une mobilité accrue comparée à un robot sur roues. Après un parcours de 14 mètres, il est capable de revenir à son point de départ avec une précision d’un centimètre, sans utiliser de GPS ni de cartographie.
Pour réaliser cet exploit, ils ont développé un « compas optique » afin de naviguer grâce aux rayons ultraviolets polarisés du ciel offrant une précision de 0,4°, quelle que soit la couverture nuageuse. Si la météo ne constitue pas un obstacle, ce robot ne fonctionne pour l’instant que de jour. À l’heure actuelle, les chercheurs n’ont pas encore testé ce système de nuit, lorsqu’il pourrait être perturbé par la pollution lumineuse…
Une économie importante
Les chercheurs ont découvert un moyen ingénieux de réduire les coûts de production de leur « boussole céleste ». Un capteur optique traditionnel équivalent se composerait de deux rangées de 374 pixels afin de capter la lumière polarisée. Un tel appareil coûterait plus de 78.000 euros à produire. Ils ont réduit le matériel nécessaire en utilisant seulement deux pixels surmontés de deux filtres polarisés tournants. Ce nouveau capteur coûte seulement quelques centaines d’euros.
Ce système, couplé à la mobilité offerte par le déplacement sur pattes, pourrait permettre de créer des robots capables d’accéder à n’importe quel environnement (par exemple, en cas de sinistre), et pourrait même être intégré aux sondes utilisées pour explorer d’autres planètes, sans dépendance au système GPS. Il pourrait également être intégré dans la vie quotidienne afin d’améliorer la navigation des voitures autonomes ou des drones. Combiné aux recherches sur les robots insectes, il permettrait à des nuées de petits drones de travailler de manière collective à diverses tâches avec une intelligence distribuée, en sachant précisément la position de chaque machine.
Ce qu’il faut retenir
- Ce robot s’inspire d’une fourmi du désert pour se déplacer sans GPS.
- Le CNRS et leurs collègues d’Aix-Marseille Université sont parvenus à réduire les coûts.
- Ce système pourrait à terme équiper des drones et des véhicules autonomes.
Cela vous intéressera aussi
[ad_2]
Yalayolo Magazine
Mars87 Innovative Digital And Social Media Marketing
