

![[CONFIDENTIEL] Apple rachète Texture, le «Netflix des magazines»](https://yalayolo.co/wp-content/uploads/2020/11/texture-apple-360x180.png)
![[CONFIDENTIEL] Bitcoin, WeWork, Lyft, Donald Trump vs. Broadcom, Dropbox…](https://yalayolo.co/wp-content/uploads/2020/11/john-oliver-hbo-bitcoin-crypto-360x180.png)
![[CONFIDENTIEL] 45 millions de dollars pour le fonds de Snoop Dogg dédié au cannabis](https://yalayolo.co/wp-content/uploads/2020/11/youtube-550x342-360x180.jpg)
![[CONFIDENTIEL] Wikipédia vs. YouTube, Hellocare, Theranos, Early Birds…](https://yalayolo.co/wp-content/uploads/2020/11/hellocare-360x180.jpg)
![[INSIDERS] Dominique Delport, rattrapé par le Vice](https://yalayolo.co/wp-content/uploads/2020/11/vice-media-360x180.jpg)
![[INSIDERS] Twitter veut interdire les publicités sur les cryptomonnaies](https://yalayolo.co/wp-content/uploads/2020/10/bitcoin-smartphone-360x180.jpg)












![[Tribune] « Le cookie est mort, vive la Customer Data Platform ! »](https://yalayolo.co/wp-content/uploads/2022/10/Tribune-cookie-est-mort-vive-Customer-Data-F-360x180.jpg)

































[ad_1]
Des chercheurs du CNRS ont mis au point un prototype de drone capable de modifier sa morphologie pour se faufiler dans des passages étroits. Ils ont trouvé l’inspiration chez les oiseaux et les insectes, capables de ce genre de prouesse.
En compétition, les pilotes de drones s’épuisent en souvent moins d’une minute dans des manœuvres d’évitement d’obstacles ou de franchissement de minuscules portillons, agressives et énergivores. Du côté de la nature, c’est différent. Plutôt que se repositionner brutalement avec des angles improbables, les insectes ailés et les oiseaux procèdent préfèrent modifier leur morphologie lorsqu’un obstacle se présente. Et c’est encore une fois le biomimétisme qui a permis à l’équipe des chercheurs de l’Institut des sciences du mouvement – Étienne-Jules Marey (CNRS/Aix-Marseille Université) de créer un robot volant pourvu des mêmes stratégies.
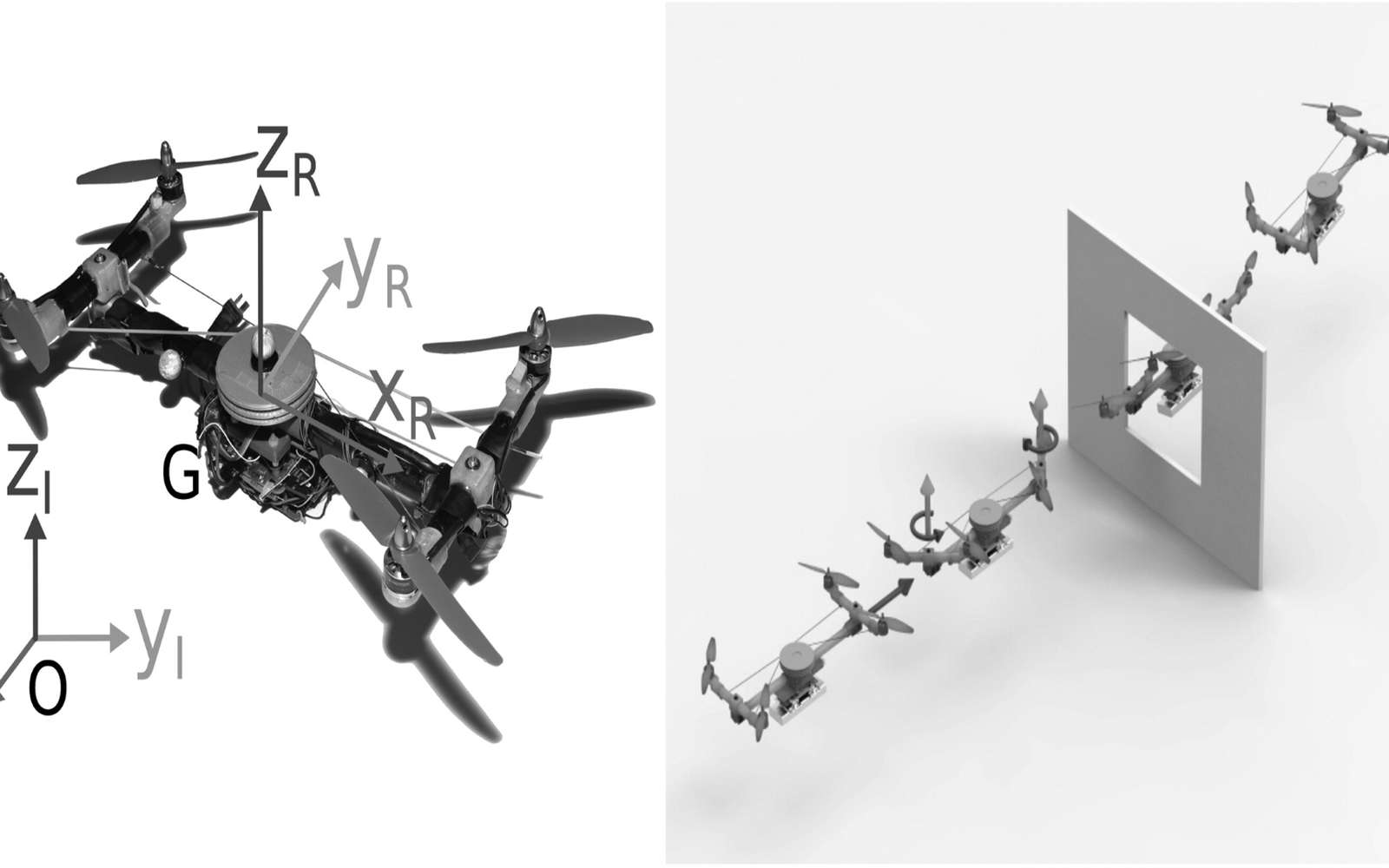
Ce « drone », unique en son genre, diffère de nombreuses autres recherches et expérimentations en la matière. Il y a bien eu le drone funambule de l’université de Zurich, capable de se rétablir tout seul en cas de bourrasque. Mais le Quad-Morphing, c’est le nom du prototype du CNRS, sait, lui, modifier l’orientation de ses deux bras motorisés pour franchir un obstacle, les positionnant selon les besoins parallèlement ou perpendiculairement à l’axe central.
Pour cela, un servomoteur rapide et précis est placé sur la partie centrale du drone. Il fait pivoter un axe entraînant des câbles flexibles et rigides pour réorienter les bras portant les deux rotors à leur extrémité. Pour orchestrer les manœuvres, parmi l’arsenal d’auto-pilotage, les chercheurs ont intégré une unité de de mesure inertielle à six axes, ainsi qu’une carte de contrôleur des rotors. Elle leur permet de se synchroniser à la volée lors des changements de position du bras.
48 % d’envergure en moins en seulement 250 millisecondes
Avec ce procédé, les scientifiques sont parvenus à réduire l’envergure de l’aéronef de 48 % pour franchir une minuscule porte à la vitesse de 2,5 mètres par seconde. Le changement de position des bras ne prend que 250 millisecondes ! Pour que l’autopilote puisse anticiper au maximum la morphologie à adopter pour franchir un passage étroit, le drone a été équipé d’une mini-caméra restituant 120 images par seconde. Les données sont traitées en temps réel par un système de localisation 3D.
Les grosses difficultés des chercheurs ont tourné autour des techniques de compensation à mettre au point pour éviter la perte de contrôle lors des changements de morphologie. Il faut dire que lors des manœuvres, la modification rapide de la position des bras entraîne fatalement une perte de stabilité en raison de l’inertie et des changements d’angles. Malgré l’absence de collision et un système compensation pointu, les chercheurs ont constaté que l’appareil perdait instantanément de l’altitude et prenait également un angle inférieur à 10°. Rien de rédhibitoire, en regard du succès des expérimentations. Toutefois, ce problème issu d’un manque de synchronisation des rotors devrait être optimisé dans l’avenir.
Ce type de technologie pourrait être exploité pour introduire des drones spécialisés dans des interstices étroits lors des missions de sauvetage ou d’analyse dans les milieux confinés.
Ce qu’il faut retenir
- Le prototype de drone Quad-Morphing mis au point par le CNRS change de configuration pour franchir des passages étroits.
- En un temps très court, il replie ses deux bras motorisés.
[ad_2]
Yalayolo Magazine
Mars87 Innovative Digital And Social Media Marketing
![[Quiz] Connaissez-vous le jargon du marketing ?](https://yalayolo.co/wp-content/uploads/2019/03/quiz-jargon-marketing-75x75.jpg)